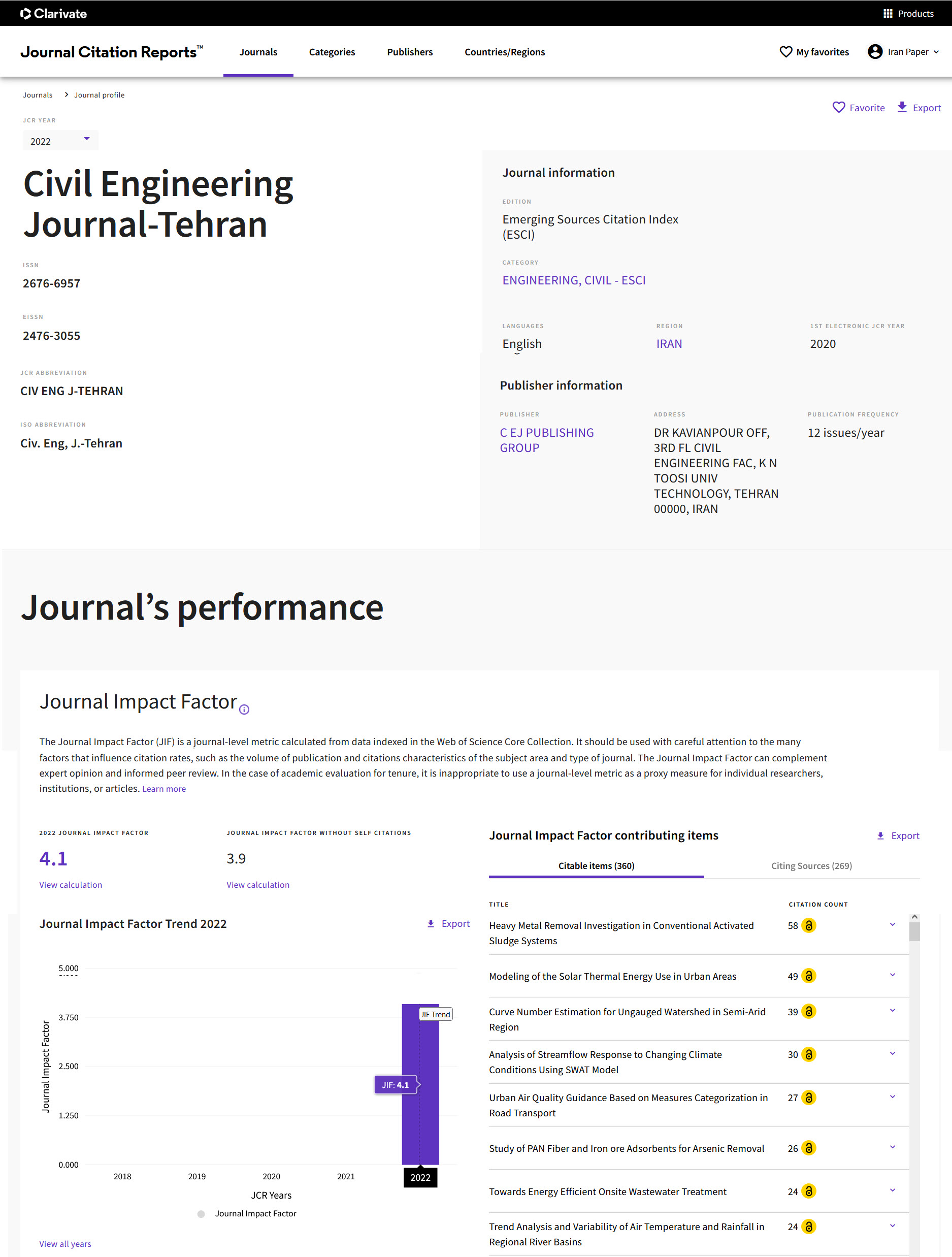
An Alternative Vehicle Counting Tool Using the Kalman Filter within MATLAB
Abstract
This study proposes an alternative and economical tool to estimate traffic densities, via video-image processing adapting the Kalman filter included in the Matlab code. Traffic information involves acquiring data for long periods of time at stationary points. Vehicle counting is vital in modern transport studies, and can be achieved by using different techniques, such as manual counts, use of pneumatic tubes, magnetic sensors, etc. In this research however, automatic vehicle detection was achieved using image processing, because it is an economical and sometimes even faster option. Commercial automatic vehicle detection and tracking programs/applications already exist, but their use is typically prohibitive due to their high cost. Large cities can obtain traffic recordings from surveillance cameras and process the information, but it is difficult for smaller towns without such infrastructure or even assigned budget. The proposed tool was developed taking into consideration these difficult situations, and it only requires users to have access to a fixed video camera placed at an elevated point (e.g. a pedestrian bridge or a light pole) and a computer with a powerful processor; the images are processed automatically through the Kalman filter code within Matlab. The Kalman filter predicts random signals, separates signals from random noise or detects signals with the presence of noise, minimizing the estimated error. It needs nevertheless some adjustments to focus it for vehicle counting. The proposed algorithm can thus be adapted to fit the users’ necessities and even the camera’s position. The use of this algorithm allows to obtain traffic data and may help small cities´ decision makers dealing with present and future urban planning and the design or installment of transportation systems.
Keywords
References
Garber, N.J. & Hoel, L.A. (2005). Traffic and highway engineering. Cengage Learning. New York, Thomson ed., 1170 p. ISBN 10: 0495082503.
Zheng, P., & Mike, M. (2012). An investigation on the manual traffic count accuracy. Procedia-Social and Behavioral Sciences, 43, 226-231. DOI: 10.1016/j.sbspro.2012.04.095.
Findley, D. J., Cunningham, C. M., & Hummer, J. E. (2011). Comparison of mobile and manual data collection for roadway components. Transportation Research Part C: Emerging Technologies, 19(3), 521-540. DOI: 10.1016/j.trc.2010.08.002.
Jung, Y. K., & Ho, Y. S. (1999). Traffic parameter extraction using video-based vehicle tracking. In Intelligent Transportation Systems, 1999. Proceedings. 1999 IEEE/IEEJ/JSAI International Conference on (pp. 764-769). IEEE. DOI: 10.1109/ITSC.1999.821157
Park, M.W., Palinginis, E., Brilakis, I., Laval, J., Hunter, M., & Guensler, R. (2014). Unsupervised framework traffic counting: speed estimation based on camera network data. In Computing Civil and Building Engineering, 1594-1601. DOI: 10.1061/9780784413616.198
Bhaskar, P.K. & Yong, S.P. (2014). Image processing based vehicle detection and tracking method. In Computer and Information Sciences (ICCOINS), 2014 International Conference, IEEE, 1-5. DOI: 10.1109/ICCOINS.2014.6868357
Moridani, A.K., Fakhrmoosavy, S.H., & Moridani, M.K. (2015). Vehicle detention and tracking in roadway traffic analysis using Kalman filter and features. International Journal of Imaging and Robotics, 15(2), 45-52, ISSN 2231-525X.
Lee, K.W., & Kim, J.W. (1999). An automated abstraction and search for surveillance video based on spatio-temporal events of objects. ISO/TEC JTC1/SC29/WG11MPEG99/p615.
Almagambetov, A., Velipasalar, S., & Casares, M. (2015). Robust and computationally lightweight autonomous tracking of vehicle taillights and signal detection by embedded smart cameras. IEEE Transactions on Industrial Electronics, 62(6), 3732-3741. DOI: 10.1109/TIE.2015.2400420
Bas, E., Tekalp, A. M., & Salman, F. S. (2007, June). Automatic vehicle counting from video for traffic flow analysis. In Intelligent Vehicles Symposium, 2007 IEEE (pp. 392-397). IEEE. DOI: 10.1109/IVS.2007.4290146
Zhou, J., Gao, D. & Zhang D. (2007). Moving vehicle detection for automatic traffic monitoring. IEEE Transactions on Vehicular Technology, 56(1), p. 51-59. DOI: 10.1109/TVT.2006.883735.
Suryatali, A. & Dharmadhikari, V. B. (2015). Computer vision based vehicle detection for toll collection system using embedded Linux. In Circuit, Power and Computing Technologies (ICCPCT), 2015 International Conference IEEE, 1-7. DOI: 10.1109/ICCPCT.2015.7159412
Vishnu, V.M., Rajalakshmi, M. & Nedunchezhian, R. (2017). Intelligen traffic video surveillance and accident detection system with dynamic traffic signal control. Cluster Computing, 1-13. DOI: 10.1007/s10586-017-0974-5
Sun, X., Ding, J., Dalla Chiara, G., Cheah, L., & Cheung, N. M. (2017). A generic framework for monitoring local freight traffic movements using computer vision-based techniques. In Models and Technologies for Intelligent Transportation Systems (MT_ITS), 2017 5th IEEE International Conference, 63-68. DOI: 10.1109/MTITS.2017.8005592
Censo de población y vivienda México 2010. INEGI (Instituto Nacional de Estadística y Geografía) www.inegi.org.mx.
Rodriguez, H. Exceso de parque vehicular ¿Por qué hay tantos automóviles en la ciudad? La Crónica Chihuahua, January 2016. www.cronicadechihuahua.com/capital/2016/Enero/exceso-de-parque-vehicular/
Plan de Desarrollo Urbano del Centro de Población Chihuahua, Tercera Actualización. IMPLAN, H. Ayuntamiento de Chihuahua (2009) www.implanchihuahua.gob.mx/pdu2040/ psmus/diagnostic_urbano.pdf
Quezada, M. and Barrientos, H. Se queda Chihuahua sin transporte público. El Diario de Chihuahua, July 2016. http://diario.mx/Estado/2016-07-02_1290468f/se-queda-chihuahua-sin-transporte-publico/
Source: “Chihuahua City” 28°40’12.77” N and 106°04’36.85” W. Google Earth. July 17, 2015. June 10, 2016.
Laplante, P. A., & Neill, C. J. (2003). A class of Kalman filters for real-time image processing. In SPIE (Vol. 5012, pp. 23-29). DOI: 10.1117/12.477499
Schneider, F., Easterbrook, S. M., Callahan, J. R., & Holzmann, G. J. (1998, April). Validating requirements for fault tolerant systems using model checking. In Requirements Engineering, 1998. Proceedings. 1998 Third International Conference on (pp. 4-13). IEEE. DOI: 10.1109/ICRE.1998.667803
Biemond, J., Rieske, J., & Gerbrands, J. (1983). A fast Kalman filter for images degraded by both blur and noise. IEEE Transactions on Acoustics, Speech, and Signal Processing, 31(5), 1248-1256. DOI: 10.1109/TASSP.1983.1164186
Kanhere, N.K. & Birchfield, S.T. (2008). Real-time incremental segmentation and tracking of vehicles at low camera angles using stable features. IEEE Transactions on Intelligent Transportation System, 9(1), 148-160. DOI: 10.1109/TITS.2007.911357
Piovoso, M., & Laplante, P. A. (2003). Kalman filter recipes for real-time image processing. Real-Time Imaging, 9(6), 433-439. DOI: 10.1016/j.rti.2003.09.005
Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. Journal of basic Engineering, 82(1), 35-45.
Bishop, G., & Welch, G. (2001). An introduction to the Kalman filter. Proc of SIGGRAPH, Course, 8(27599-23175), 41.
Grewal, M. S., & Andrews, A. P. (2001) Kalman filtering: theory and practice using MATLAB, John Wiley, NY. ISBN: 9780471266389, DOI: 10.1002/0471266388
Welch, G. & Bishop, C. (2006). An introduction to the Kalman filter. UNC-Chapel Hill, TR 95-041.
Zarchan, P. & Musoff, H. (2000). Fundamentals of Kalman Filtering: A practical approach. American Institute of Aeronautics and Astronautics, Inc. ISBN 978-56347-455-2.
Kiencke, U., & Nielsen, L. (2000). Automotive control systems: for engine, driveline, and vehicle. Springer-Verlag Berlin Heidelberg, 512 pp., ISBN 978-3-540-26484-2, DOI: 10.1007/b137654
Szeto, M.W., & Gazis, D.C. (1972). Application of Kalman filtering to the surveillance and control of traffic systems. Transportation Science, 6(4), 419-439, DOI: 10.1287/trsc.6.4.419
Okutani, I., & Stephanedes, Y. J. (1984). Dynamic prediction of traffic volume through Kalman filtering theory. Transportation Research Part B: Methodological, 18(1), 1-11, DOI: 10.1016/0191-2615(84)90002-X
Koller, D., Weber, J., Huang, T., Malik, J., Ogasawara, G., Rao, B., & Russell, S. (1994, October). Towards robust automatic traffic scene analysis in real-time. In Pattern Recognition, Vol. 1-Conference A: Computer Vision & Image Processing., Proceedings of the 12th IAPR International Conference on (Vol. 1, pp. 126-131). IEEE. DOI: 10.1109/CDC.1994.411746
Gazis, D., & Liu, C. (2003). Kalman filtering estimation of traffic counts for two network links in tandem. Transportation Research Part B: Methodological, 37(8), 737-745, DOI: 10.1016/S0191-2615(02)00059-0
Hsieh, J.W., Yu, S.H., Chen, Y.S., & Hu, W.F. (2006). Automatic traffic surveillance system for vehicle tracking and classification. IEEE Transactions on Intelligent Transportation Systems, 7(2), 175-187, DOI: 10.1109/TITS.2006.874722.
DOI: 10.28991/cej-030935
Refbacks
- There are currently no refbacks.
Copyright (c) 2017 Daphne Espejel-García

This work is licensed under a Creative Commons Attribution 4.0 International License.